

{kind=link}
In the USA especially, convenient valet parking is a big hit: you pull up in your car right outside your destination, valet service personnel park it for you and have it brought around again as and when you need it. There is no more time-wasting search for a parking place. The V-Charge project picks up on this idea. Its development goal is fully automated searching for a parking space (‘valet parking’) within defined zones, such as in multi-storey car parks.
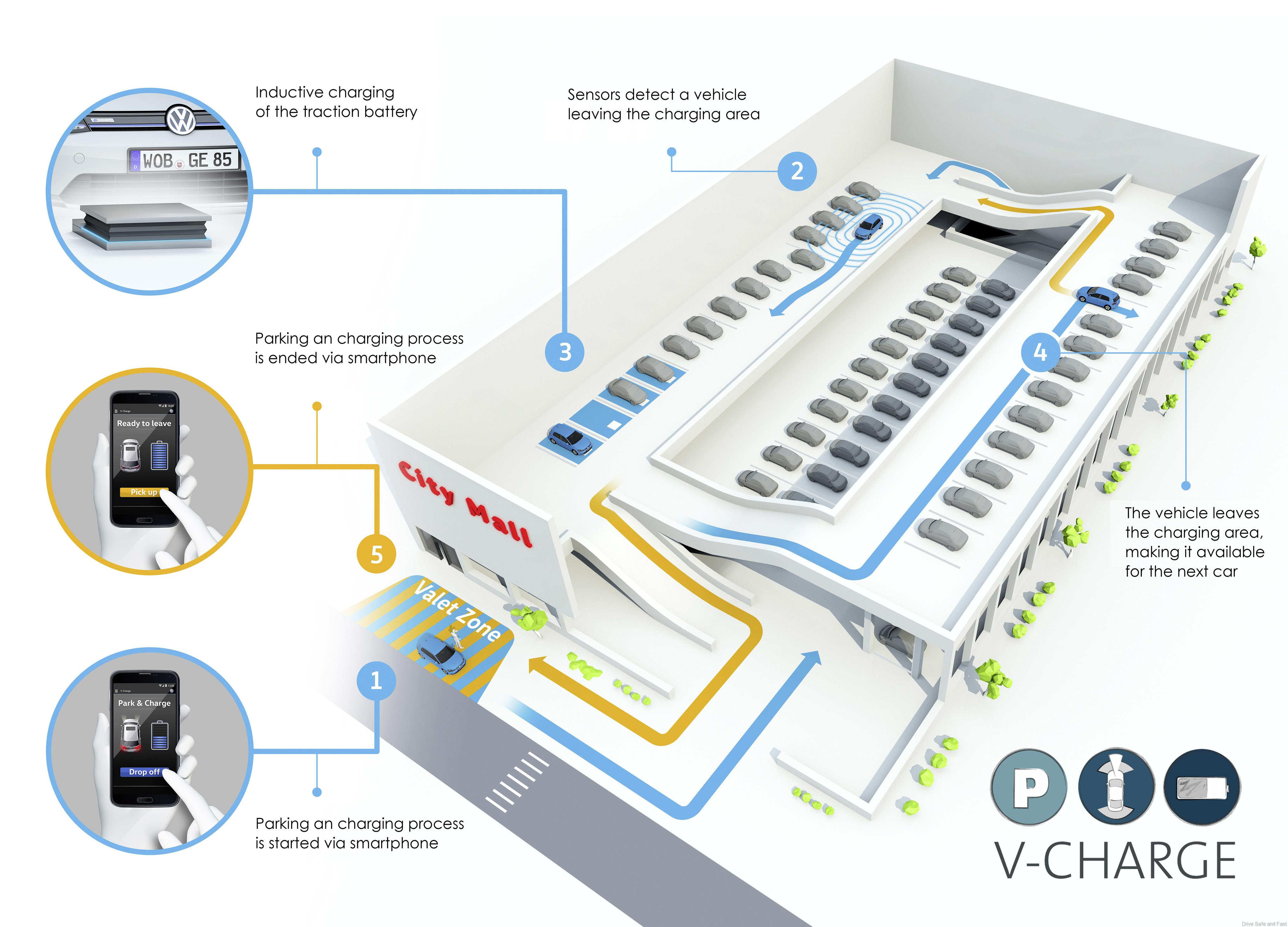
There are many scenarios that illustrate the advantages of the V-Charge concept. Take one practical everyday example: a commuter notices that he is possibly going to be late and is thus running the risk of missing an important meeting at his company. With V-Charge he is able to pull up right in front of the main entrance, get out and establish the link to his vehicle via the associated smartphone application. Operating fully automatically, the vehicle has a digital map relayed to it and within the parking area or multi-storey car park autonomously navigates to a parking space. If it is an electric vehicle, the system additionally prioritises a parking bay with an automatic charging facility. Pedestrians, cyclists and other vehicles are identified by the cameras and ultrasound sensors integrated within the vehicle. Therefore, the vehicle is allowed to travel in so-called ‘mixed traffic’. The selected parking area neither has to be an enclosed domain nor is any complex technical equipment required.
As the electric vehicle nears its destination, the system recognises via local sensors whether the allocated parking space is taken. If it is empty, the fully automatic parking manoeuvre begins and positions the vehicle exactly above the inductive charging spot. When the charging process is complete, the vehicle automatically moves to another parking space, leaving the charging station free for another electric car. When the driver returns to the multi-storey car park, he calls the vehicle back to the starting point via the V-Charge app. The vehicle moves to the defined pick-up location, with the driver not needing to set foot in the parking area or multi-storey car park.

The technical prerequisites largely already exist. During the introductory stage, for instance, it was possible to utilise sensor and camera technologies that are already being used in today’s production vehicles. A dense network of sensory devices enables autonomous operation of the V-Charge test vehicle, which is based on a Volkswagen e-Golf1. Four wide-angle cameras and two 3D cameras, twelve ultrasound sensors, digital maps and the so-called ‘Car2X’ technology for the vehicle’s communication with the infrastructure ensure that the vehicle’s surroundings are reliably detected and recognised. Pedestrians, vehicles and obstacles get identified, parking spaces recognised and measured and then this stream of data is put together in real time to form an overall picture – the task that the technical ‘sensory organs’ have to fulfil is complex and extremely varied.
